



广州市海珠外国语实验中学鞋子保洁机器人2.0上线!
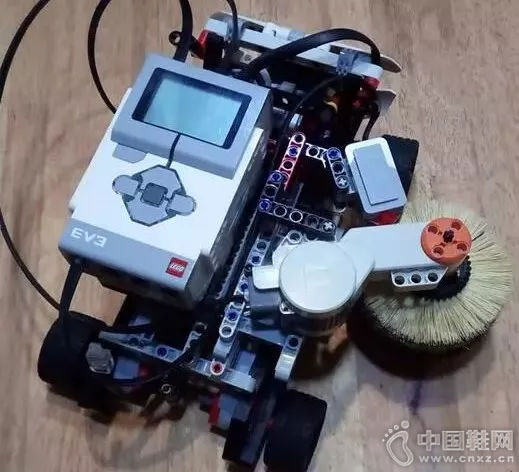

鞋子保洁机器人作品图
本届大赛设置了科学研究论文、发明创造作品、少年儿童科幻绘画、优秀科技实践活动、优秀组织奖、优秀科技教师、科技辅导员创新成果竞赛项目、发明奖、发明创造组织奖和团体奖共10个比赛项目。
广州市海珠外国语实验中学梁俊谦同学的作品《鞋子保洁机器人》,作为入围的20项科技小发明项目作品之一参赛,迅速吸引了现场专家评委的目光。

梁俊谦同学给评委介绍机器人
关于鞋子保洁机器人
构造与功能
鞋子保洁机器人,是基于乐高机器人NXT套装,外加马毛旋转刷子构成。它是一台配置了颜色传感器、触碰传感器、超声传感器的轮式机器人。它还搭载了一套旋转除尘装置。能够自动清洁各类鞋子。
设计思路
机器人能自动围绕鞋子移动,同时选择保洁刷子,清洁鞋子。
进入工作状态后,机器人开动超声传感器,不断地探测前面存在物体的距离。当人将鞋子靠近机器人的超声传感器时,机器人的大脑通过数据计算,认为鞋子就在前面了,于是开始工作了。主控模块向驱动电机发出转动的信号,并不断根据超声传感器探测结果修正移动路线,使机器人始终沿着鞋子边缘走,同时保持预定的距离。在机器人开始移动的同时,主控也开动旋转刷子,清除鞋子上面的灰尘。
工作原理
1、机器人的“脑”:
“脑”仍然是乐高机器人8547套装主控器NXT。操作系统为Lejos0.9.1。该操作系统有非常丰富、功能强大的应用编程接口(API),升级开发机器人功能十分方便。
2、机器人的“身”:
“身”用乐高的底盘组件拼装三轮底盘.
3、机器人的“手”:
“手”就是清洁单元。采用电机通过齿轮转动刷头,清洁鞋子。该单元可以绕一个轴转动。 本机器人可以具有双“手”。刷头转动方向相反,以获得平衡效果。
4、机器人的“脚”:
“脚”是伺服电机驱动的两个轮子。若采用麦克纳姆轮的话,机器人可以在地面全方位移动。非常适合在家居环境中行进。
5、机器人的“眼”、“触角”:
“眼”就是超声传感器,“触角”就是触碰传感
比赛中,评委们亲自体验了鞋子保洁机器人的功能,对其设计思路和工作方式给予肯定,认为该设计为家庭服务机器人领域提供了新的服务种类,功能符合日常生活的需求,具有实用性和创新性。

评委体验鞋子保洁机器人的功能
你也许不知道,梁俊谦同学本次的参赛作品,是鞋子保洁机器人2.0哦!之前的1.0版本,已经分别获得:
2018年广州市中小学电脑机器人竞赛活动:一等奖
第十八届广东省青少年机器人竞赛:三等奖
而本次的鞋子保洁机器人2.0,是梁俊谦同学与邹志雄指导老师经过探讨和实验,将鞋子保洁机器人向实用化方向改进的作品,即将机器人做成一张小圆凳的样子,放学到家后,就可以坐在“小圆凳”上,由机器人自动为我们清洁鞋子了。
在青少年科技教育显得日益重要的今天,海实的创客实验室和课堂已成为学校一道亮丽的科技风景线, 如今,学校的STEAM课程已成体系,普及课程、社团兴趣课程、竞赛课程分别满足不同学生的需求。
越来越多的同学,在创客课程中感受到科技的乐趣,培养了自己的创新精神和实践能力,让我们一起期待同学们带来更多“出彩”的作品吧!








